Robotique
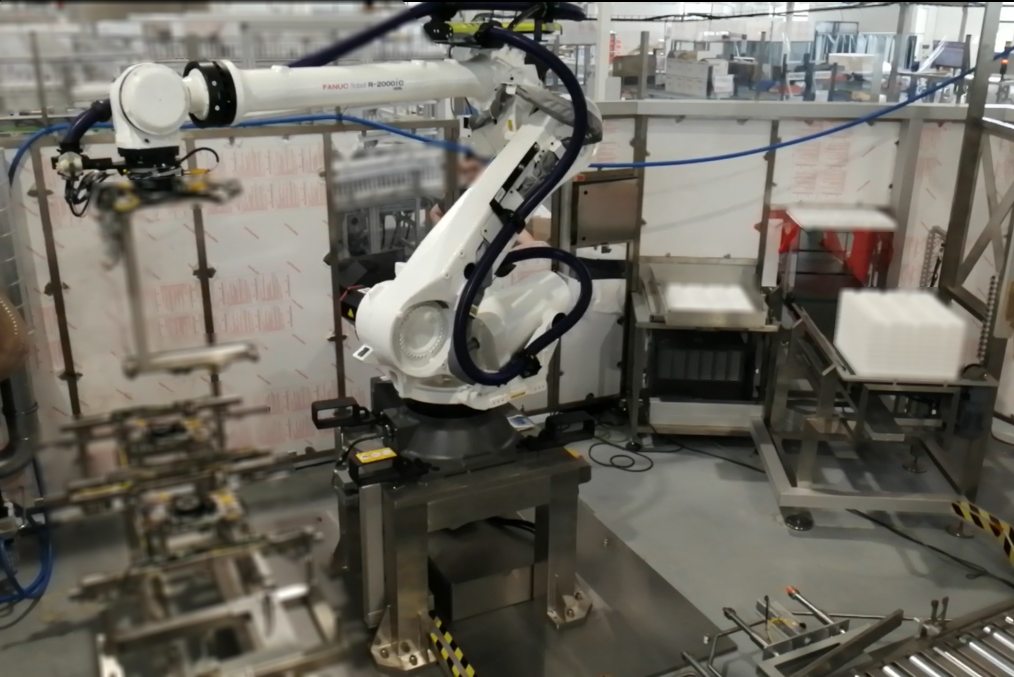
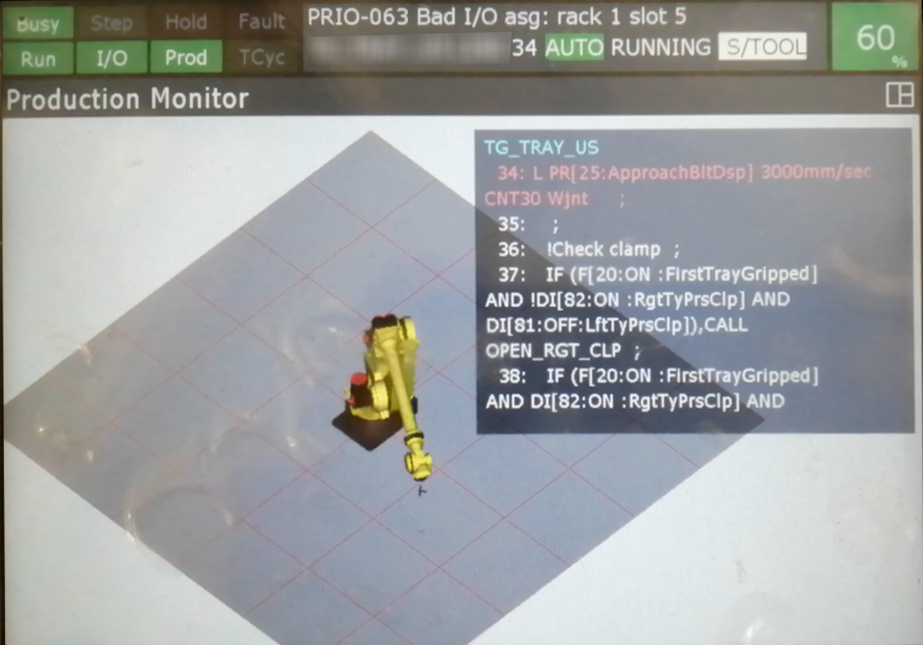
Programmation des robots FANUC à l’entrée et à la sortie d’une ligne de production de produits médicaux :
Organisation des missions & des trajectoires robot Fanuc R-2000iC/125L.
Gestion d’un changeur outil robot en fonction du produit.
Communication avec APIs pour assurer les autorisations de travail.
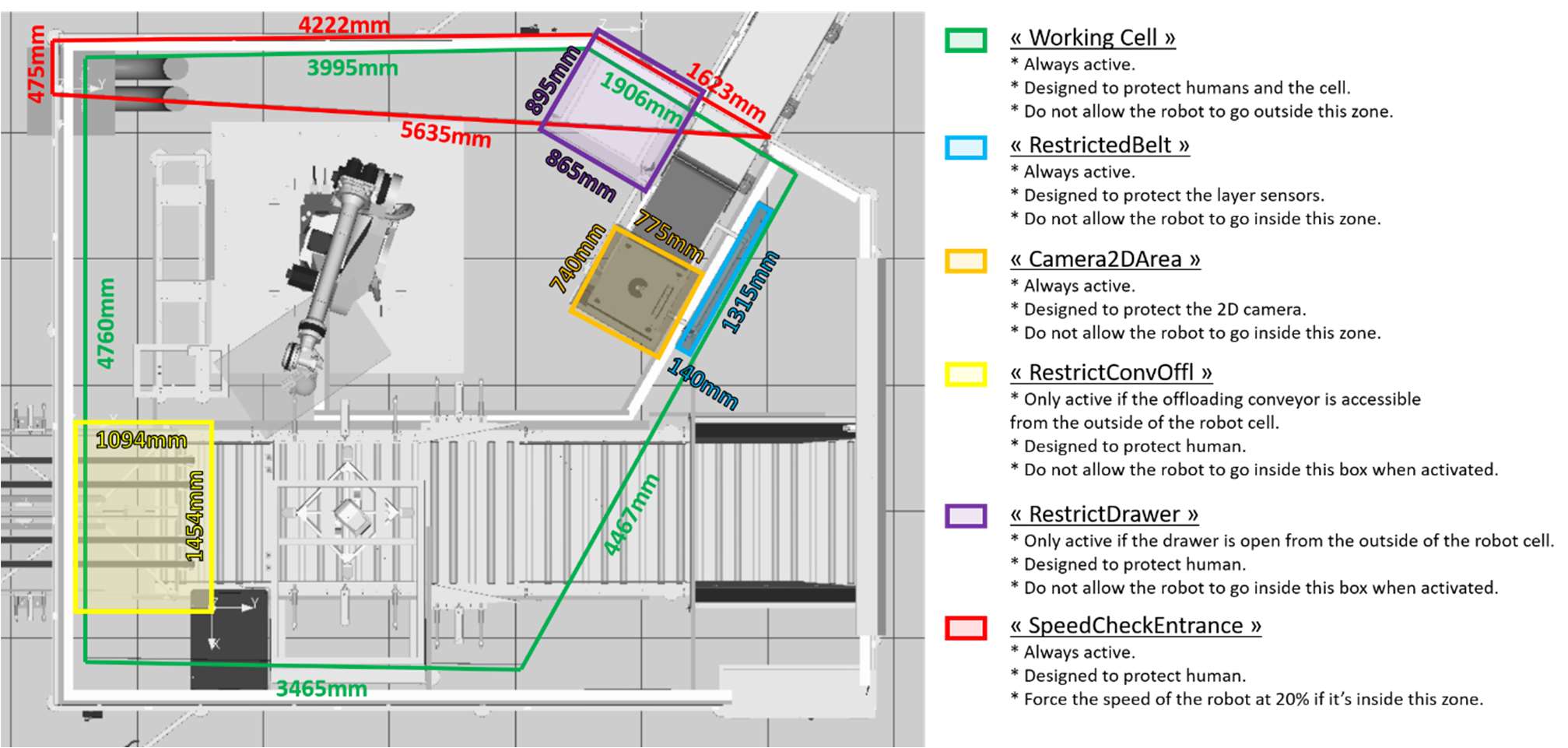
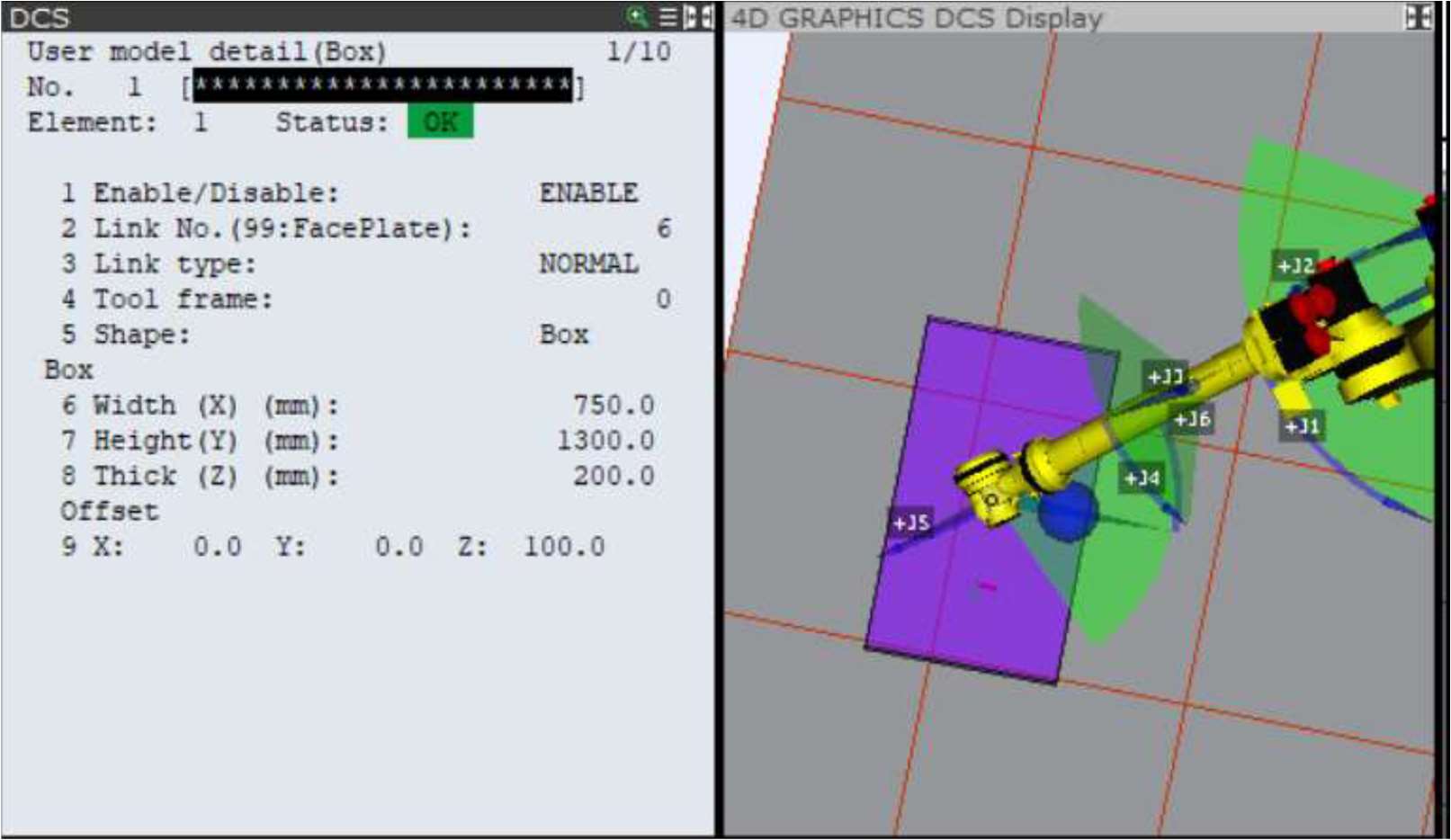
Mise en place et optimisation des DCS.
Tests et validation par FAT avec le client.
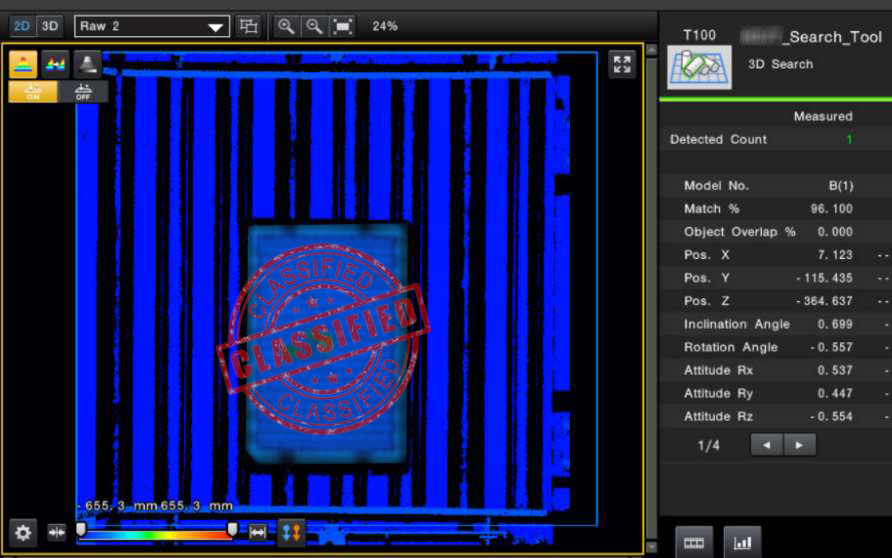
Paramétrage et dialogue avec plusieurs cameras Keyence 2D CA-H500MX et 3D RB-1 200.


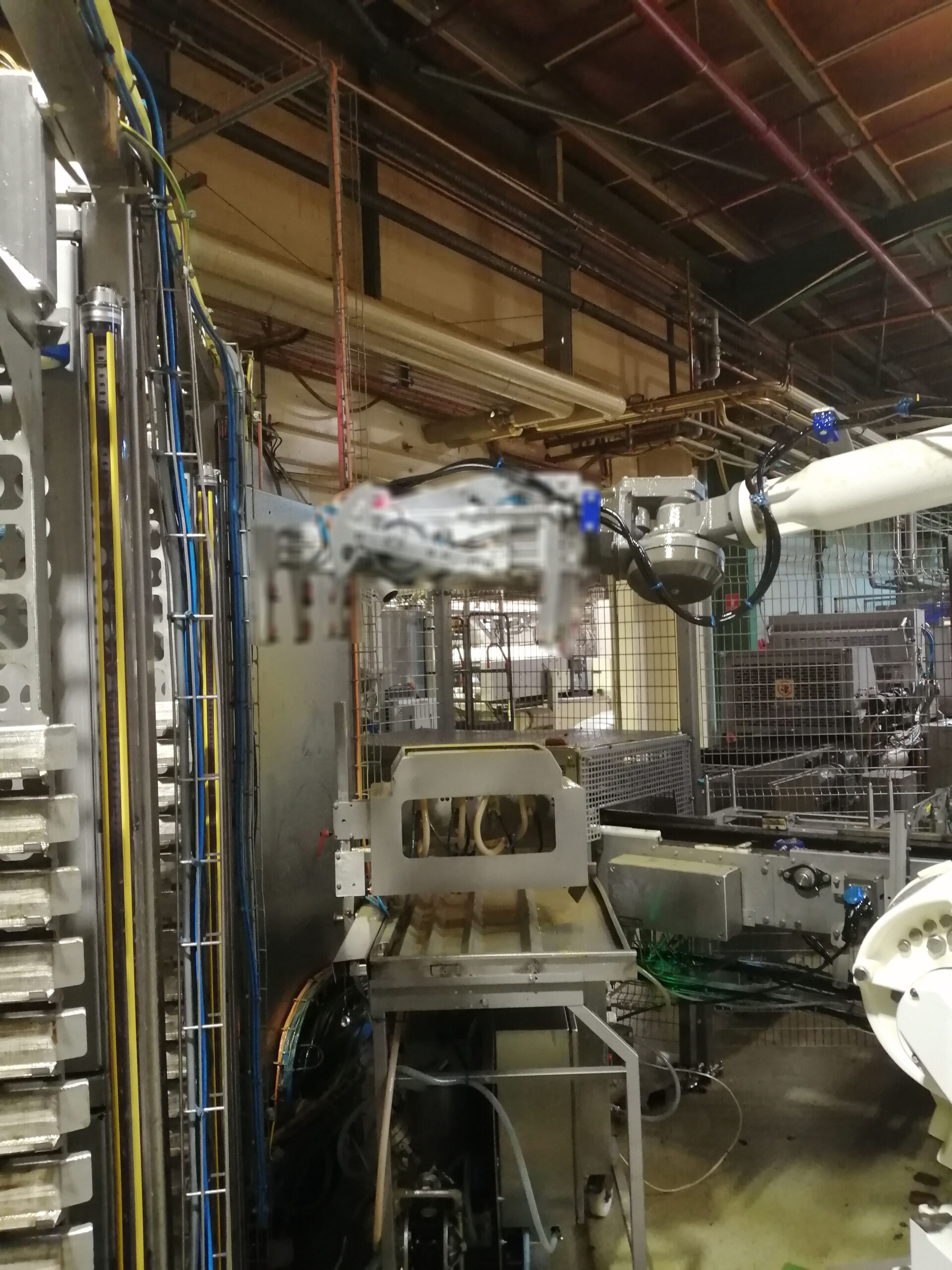
Modifications sur une ligne de dépose de couvercles de plusieurs kilos :
Cellule de 2 robots Fanuc M-710iC/70, un en entrée de ligne déposant les couvercles, et un en sortie récupérant les couvercles.
Augmentation de la cadence & fiabilisation des programmes.
Limitation de l’usure moteur des robots dans des conditions de température ambiante autour de 40°C.
Optimisation des trajectoires & sécurisation de l’environnement de travail.


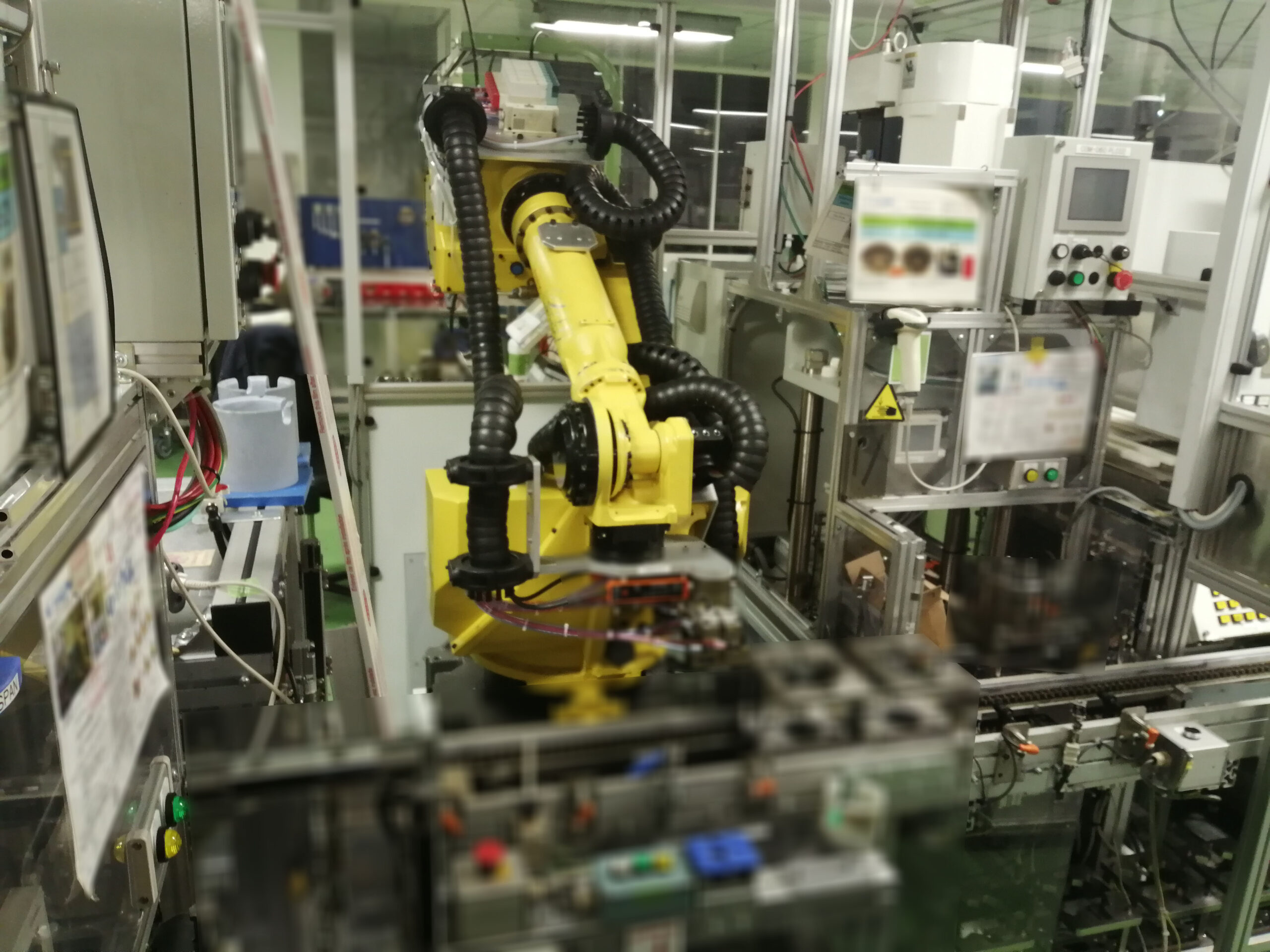
Robotisation d’une chaîne de production de compresseurs :
Cellule de 2 robots Fanuc M-710iC & LR-Mate-200iD.
Etude du standard de programmation et adaptation à ce dernier.
Développement des programmes, trajectoires, communication automate en télétravail sur Roboguide.
Tests a l’atelier lors de l’implantation du code robot.
Utilisation de Space function pour les autorisations de travail afin d’éviter tout potentiel choc, et pour permettre aux robots de se sortir de toute position dans le cas d’une coupure de courant.
Développement du traitement d’infos envoyées par une camera Cognex embarque sur le LR-Mate.

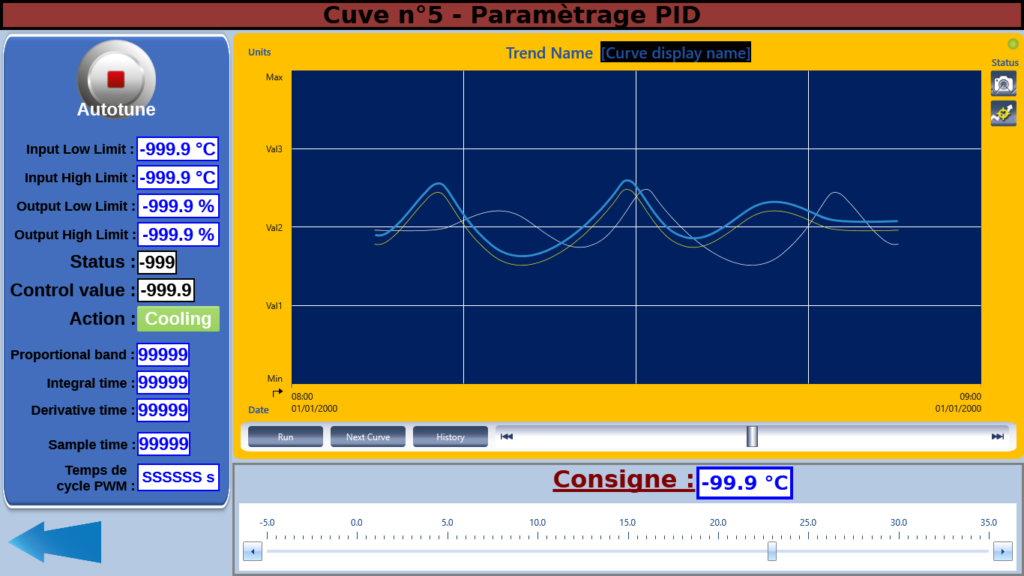
Projet sur 5 ans pour l’usinage de dispositifs médicaux ophtalmologique :
Programmation sur le logiciel RC+ 5.0 et RC+ 7.0 pour robots EPSON
Gestion de 4 robots travaillant dans le même environnement (un 6axes & quatre Scara)
Optimisation du temps de cycle dans une production devant prendre en compte la température des produits.
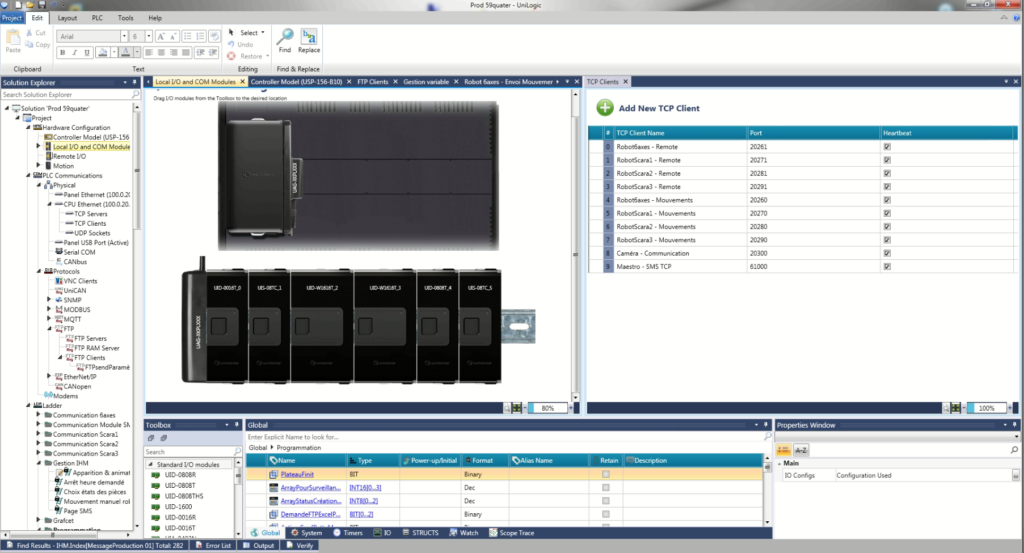
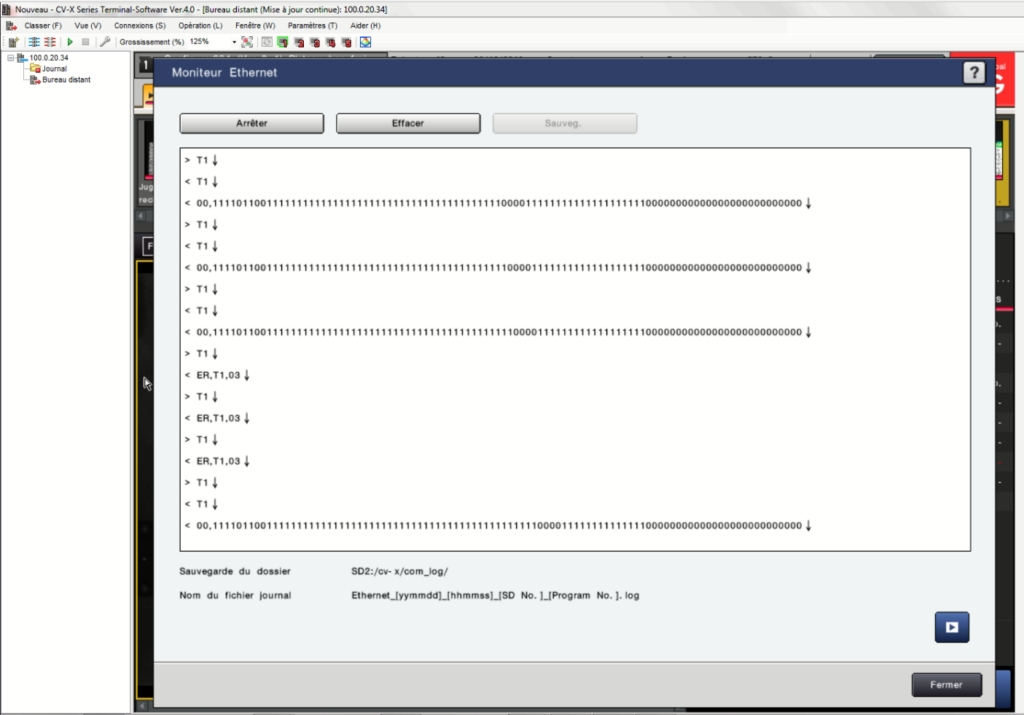
Définitions de trams de communication en TCP/IP avec un automate Unitronics
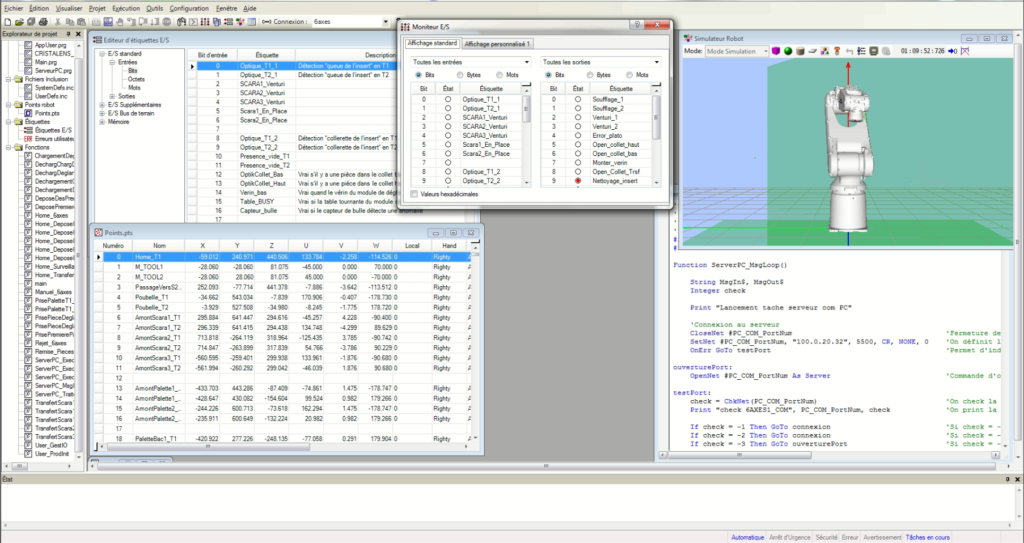
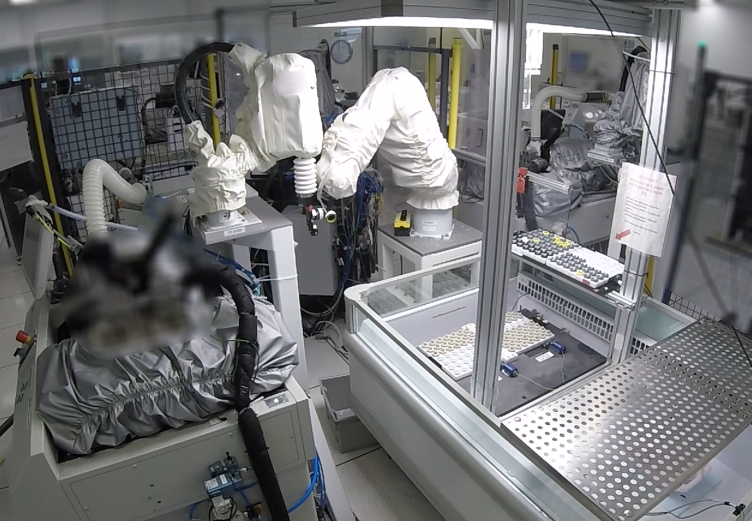
Mesures et conditionnement robotisé de palet de polymères destinés à l’usinage :
Programmation sur le logiciel RC+ 7.0 pour robots EPSON
Préhension de palet par ventouse, sur plusieurs grilles empilées.
Utilisation de la fonction de détection de contre effort du robot Scara pour venir travailler au plus près des grilles de stockage.
Placement de chaque produit sur une vitre rétro-éclairée, vérification d’absence de défaut par caméra, puis mise au rebut ou au conditionnement au besoin.

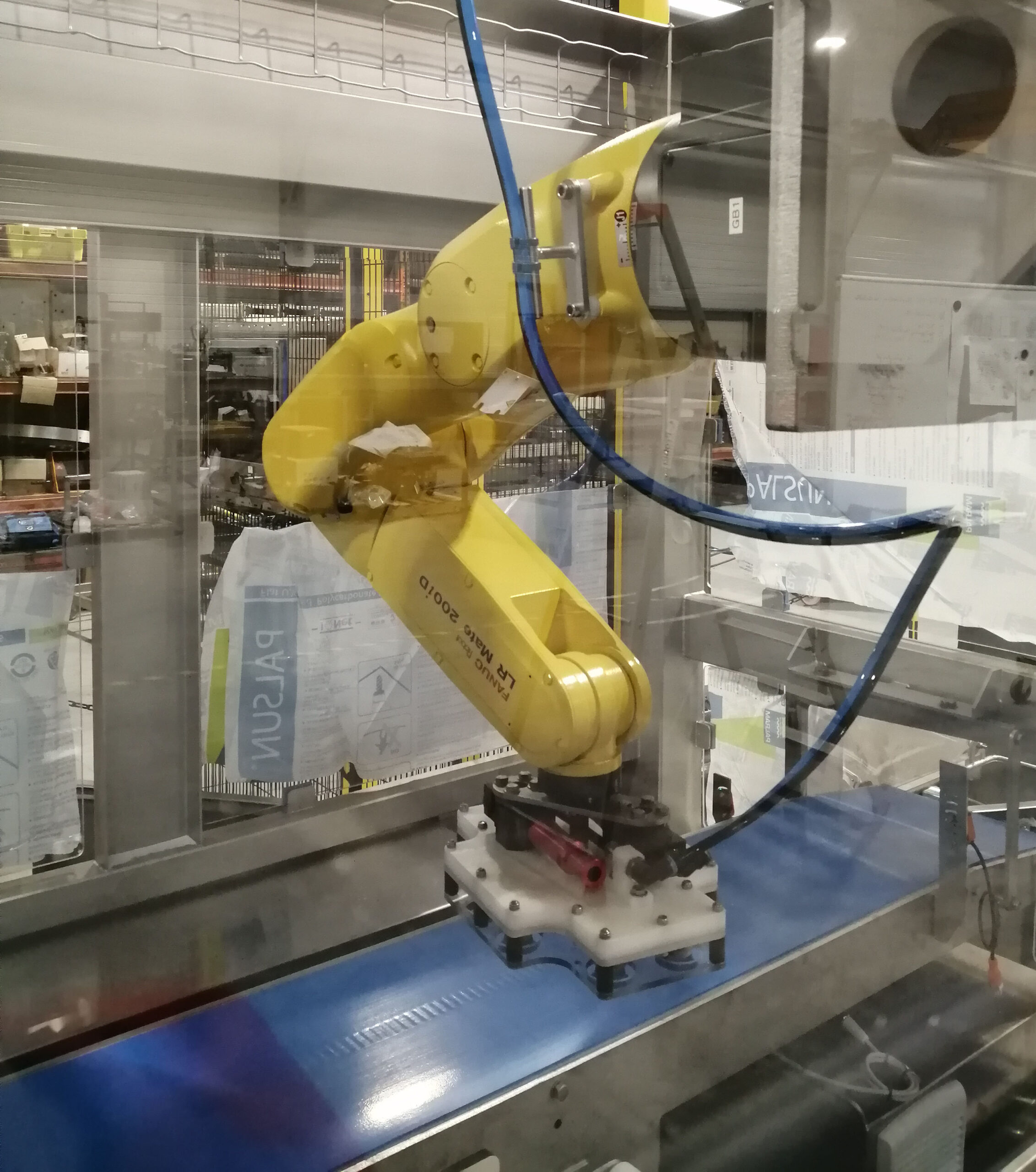
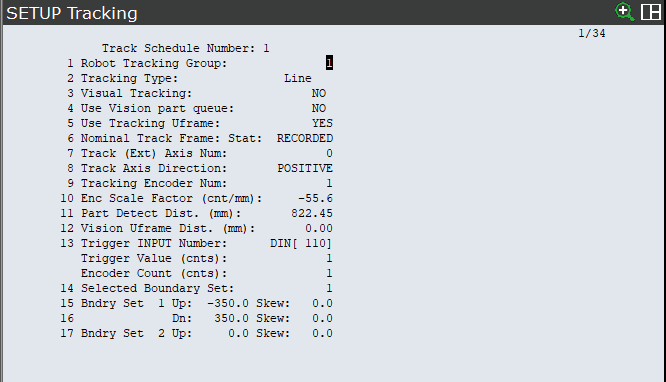
Résolution d’un problème de Line Tracking sur une ligne de conditionnement :
Robot Fanuc LR-Mate-200iD utilisant du line tracking pour la préhension de paquet.
Problématique : le code robot est un copier/coller d’une autre machine dont la mécanique est inversé par rapport à celle présent, le robot ne fonctionnait donc pas dans le bon sens avant l’intervention.
Pas d’utilisation du iRPickTool, le code avait été développé avant la mise en place de cette fonction, induisant une programmation complexe a étudier.
Résolution du problème par l’analyse du code, et la modification de nombreux paramètres.
Mise à jour de programme sur un robot de palettisation :
Reprise de points, mise à jour de DCS et résolution d’un décalage sur de la dépose de carton d’un robot Fanuc M-410iC-185.

Surveillance sur site d’un robot UR de tri de tomate :
Pas de programmation. Suivis de fonctionnement et listing de bugs visible sur un robot aidé d’une vision et d’intelligence artificielle.

Automatisme
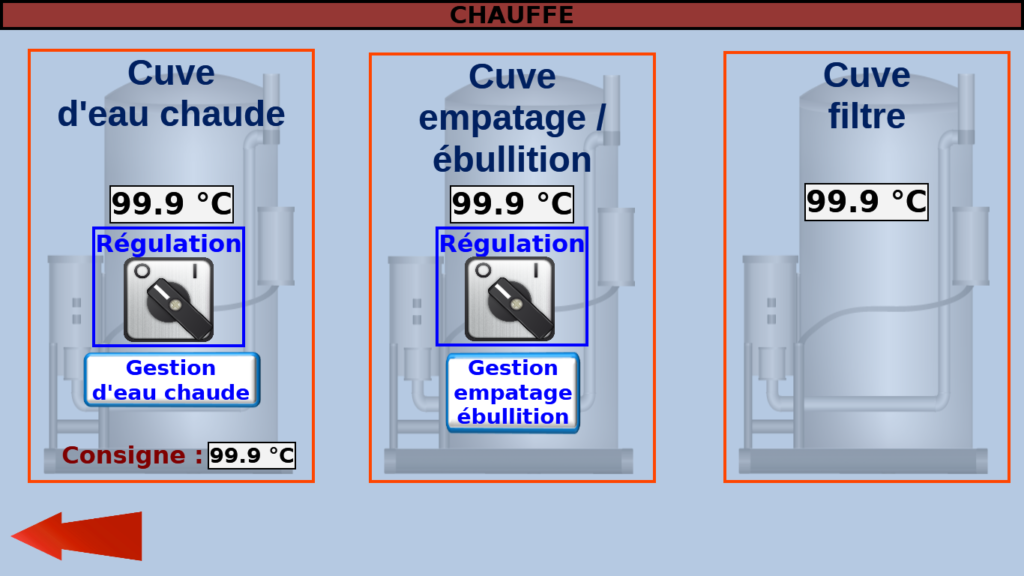
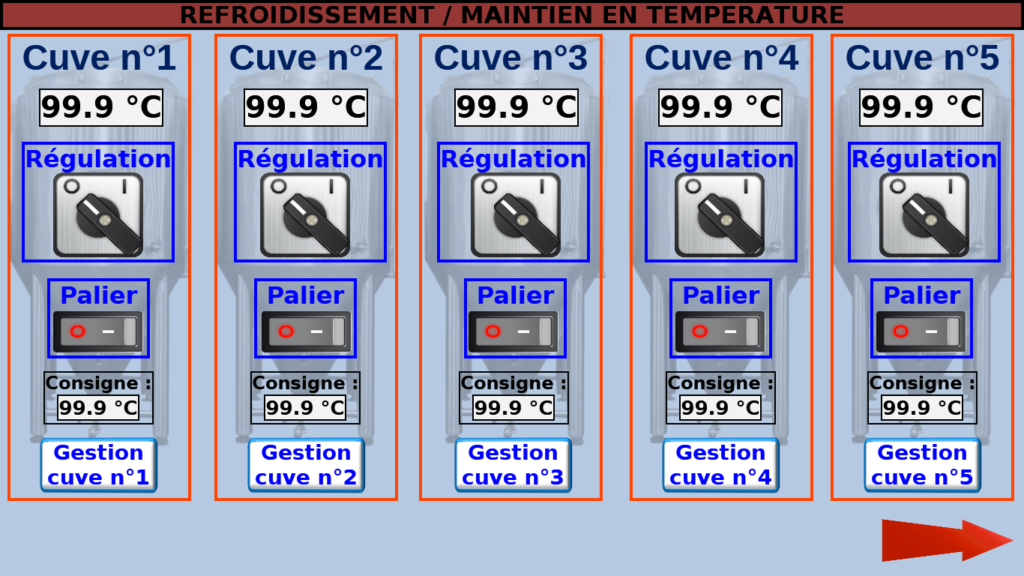
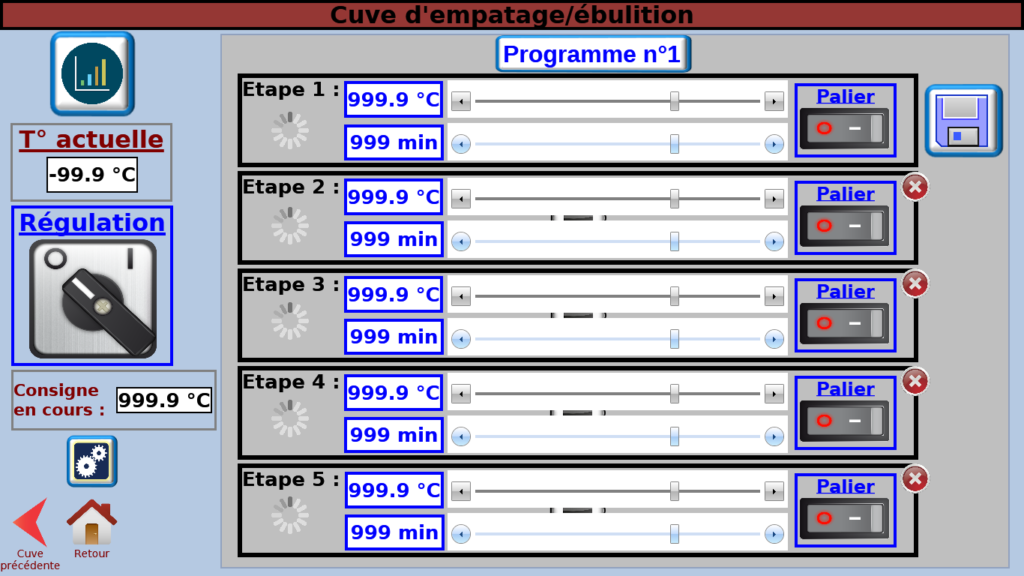
Gestion de température automatisé pour le fonctionnement d’une brasserie artisanale.
Marque Unitronics, gamme Unistream
Contrôle de capteur de températures & d’électrovannes à distance, via page internet.
Machine utilisable sur PC, smartphone ou tablette.
Programmation d’horaires de chauffe à différente puissance possible.
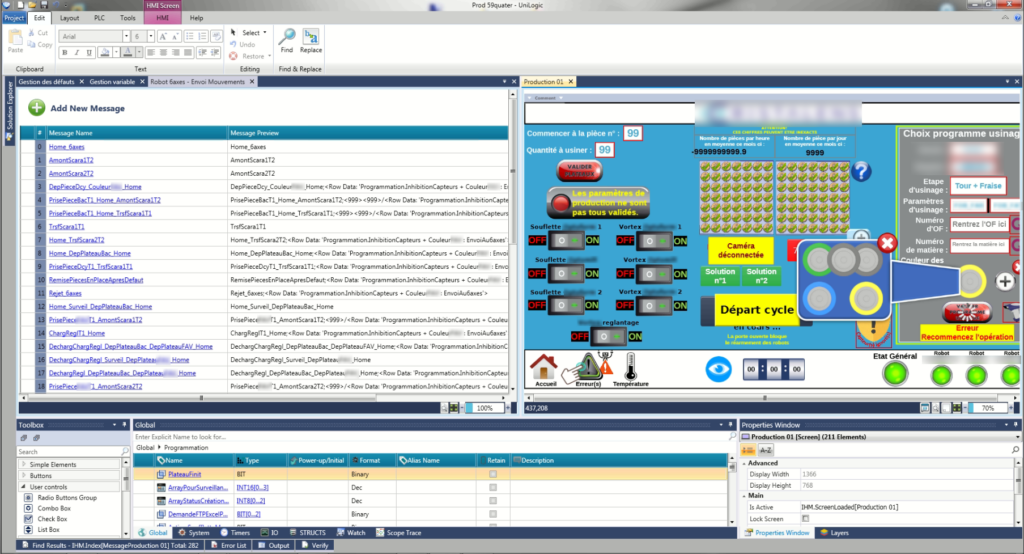
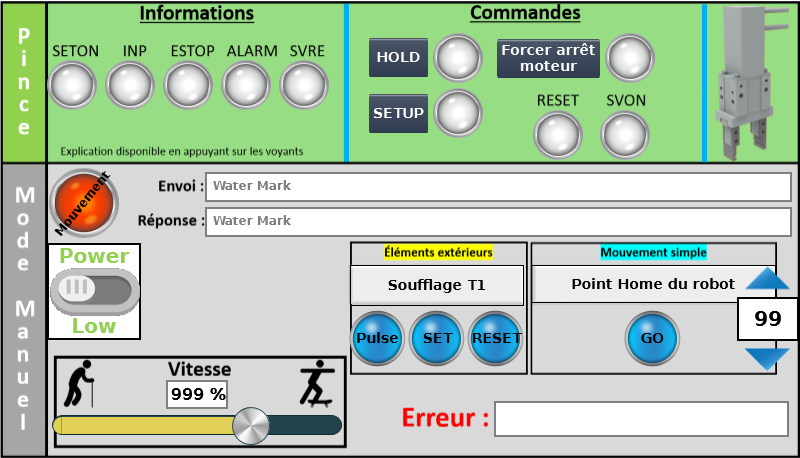
Automatisation d’une cellule robotisée pour la fabrication de dispositifs médicaux :
Marque Unitronics, gamme Unistream
Envoi de commande à des robots Epson en TCP/IP en fonction.
Détection par caméra Keyence du bon positionnement des pièces à usiner pour éviter tous chocs au moment de la préhension des robots.
Edition d’une interface homme-machine sur écran tactile, simple et compréhensible, laissant peu de place à l’erreur pour l’opérateur lors du lancement d’une production.
Programmation de deux machines de nettoyage (NEP) pour laver les camions laitiers :
Une première station de lavage avec API SCHNEIDER Zelio Logic, réalisant un lavage simple à l’acide/soude avec paramétrage basique par l’opérateur.
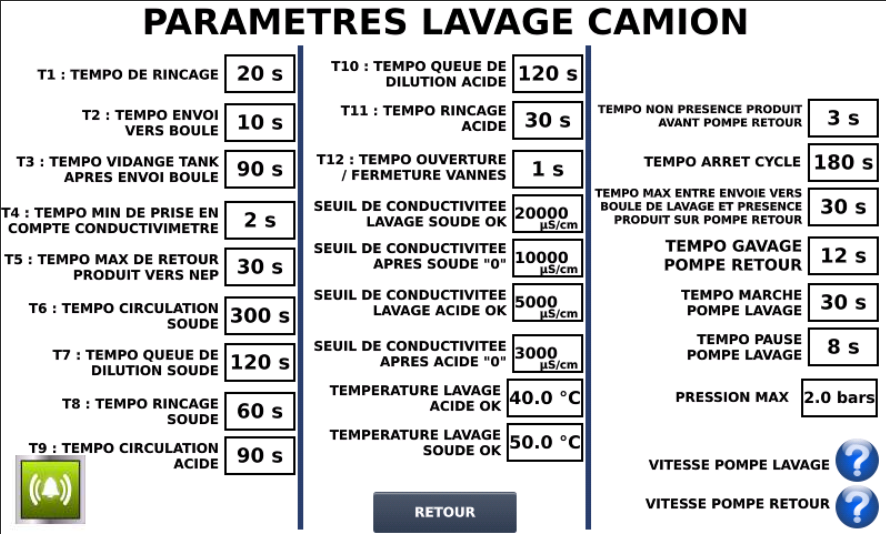
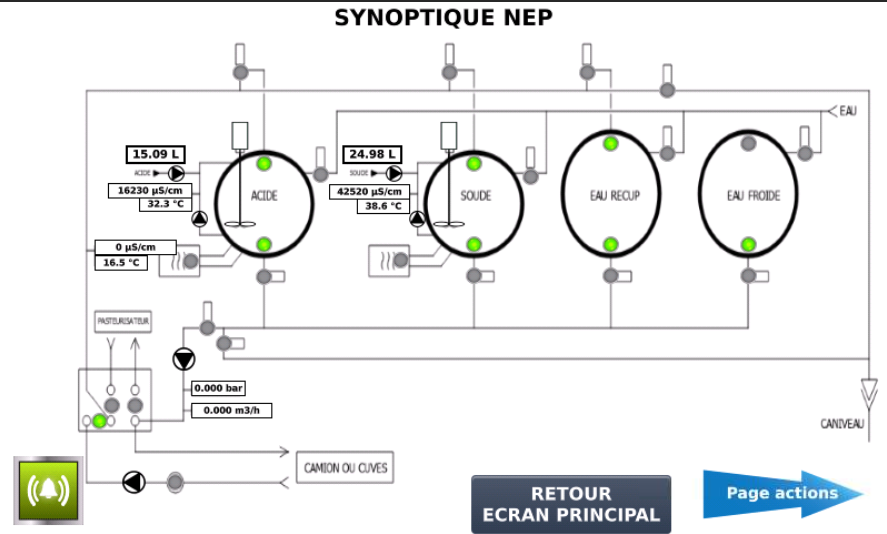
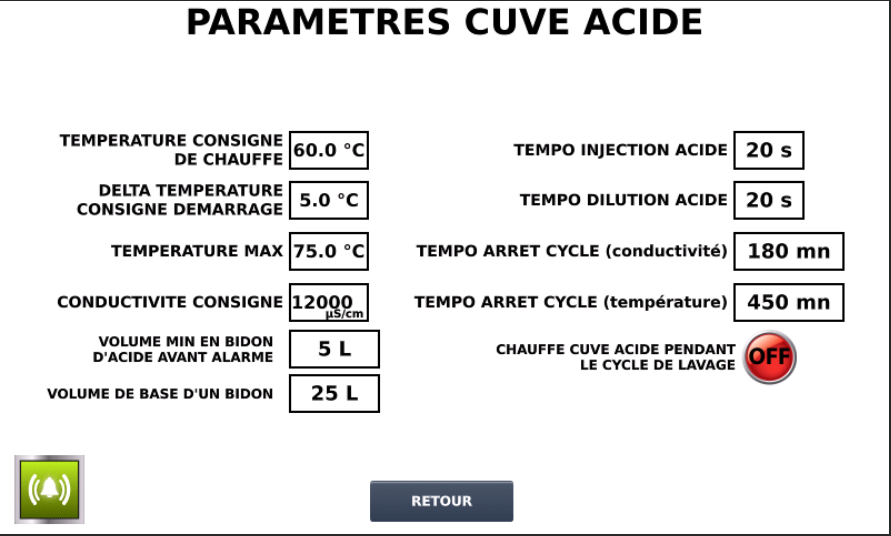
Une seconde NEP avancée, avec API Unistream USC-x5-B1 gérant 4 cuves de 1000L pour lavage à l’acide/soude et préchauffage nocturne. Un écran tactile guide l’opérateur et permet de régler les paramètres (T°, temporisation, etc.). En cas de défaut, un mail alerte l’utilisateur. Prise en main à distance par connexion internet sécurisé est possible par un administrateur.


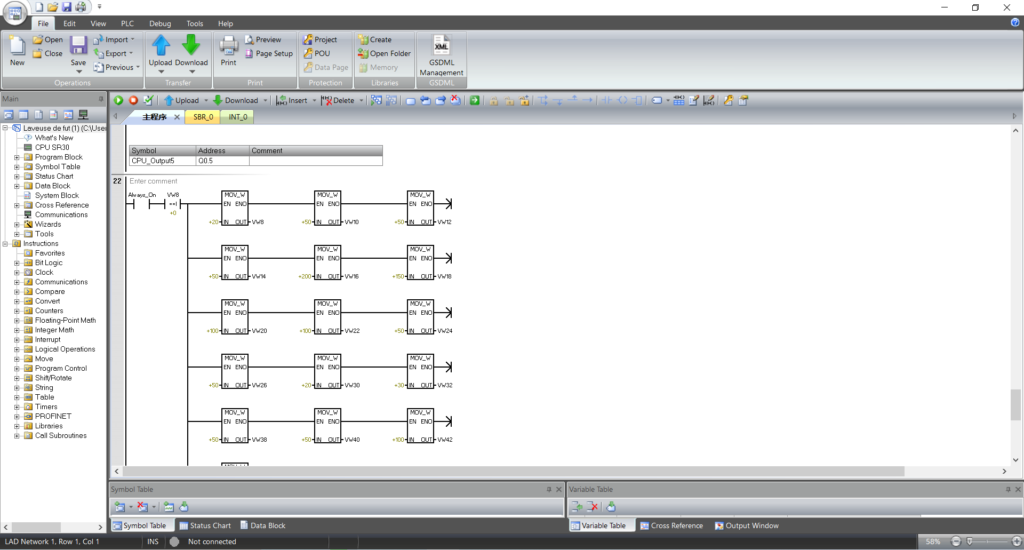
Modification de programme d’une machine à laver les fûts, déjà existante :
Logiciel STEP7-MicroWin SMART pour programmer un API SIMATIC S7-200 SMART
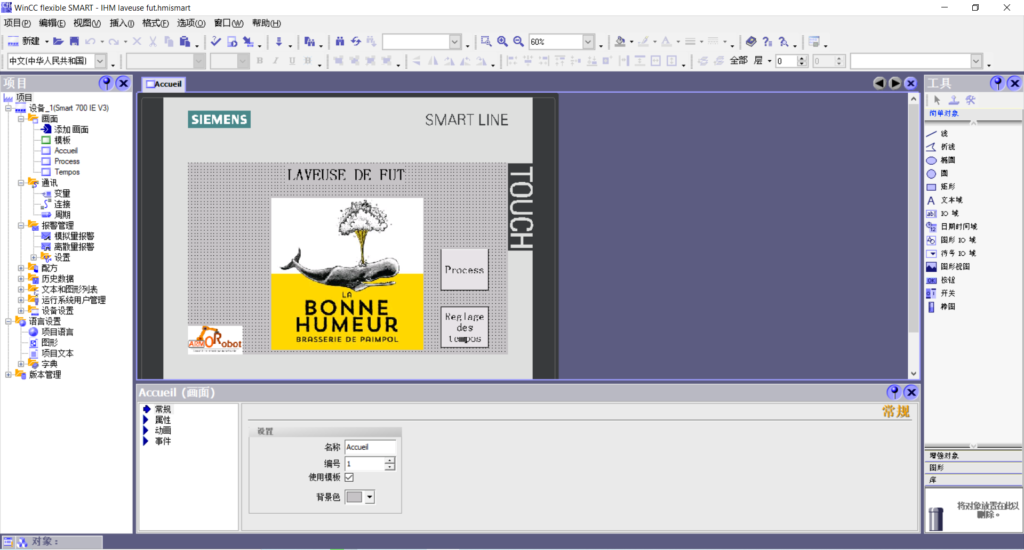
Modification d’un IHM sous le logiciel WinCC SMART uniquement en chinois pour un écran SMART LINE (SMART 700 IE V3).
Modification, sur une machine de remplissage de pots, du programme d’un API SIMATIC S7-1200.
Ajout d’une nouvelle gamme produit dans écran WAGO :
Logiciel e!COCKPIT pour venir intervenir dans le programme d’un Panel 600 de la marque WAGO
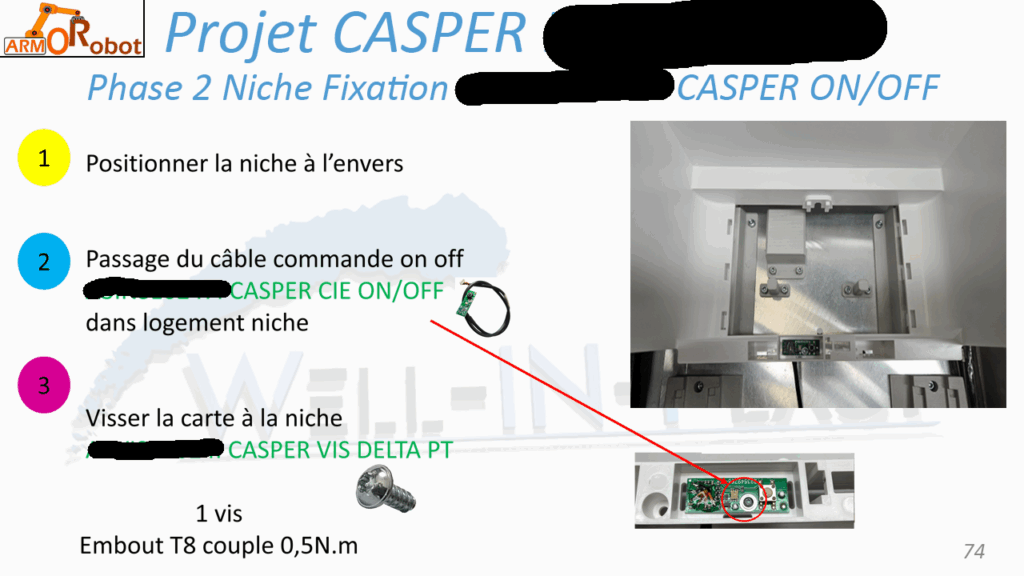
Dans une machine d’aide opérateur pour le vissage, demande d’ajout d’une nouvelle gamme de produit en réajustant les informations de couple envoyé à la visseuse, et aux opérateurs.

Vision
Détection de produits empilés par deux caméras Keyence en poste fixe :
Utilisation d’une caméra RB-1200 pour la détection de caisses empilées, permettant d’envoyer au robot la coordonnée de prise du produit le mieux positionné en fonction de la hauteur.
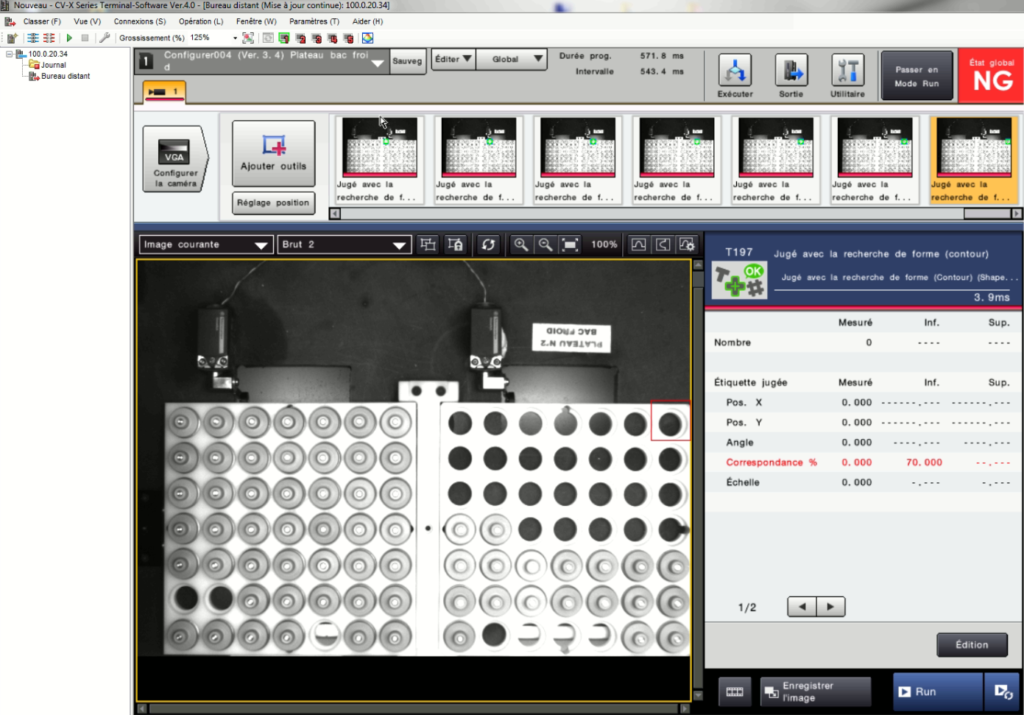
Utilisation d’une caméra CA-H500MX pour la détection de plaque afin de déterminer sa position, et son sens d’orientation pour guider au mieux la préhension du robot.

Vérification présence/absence par caméra Keyence :
Caméra positionnée en fixe dans la cellule de production.
Vérification du bon placement des pièces par l’opérateur.
Comptage du nombre de produits sous la caméra.
Envoi des infos à l’automate pour indication d’une erreur potentielle à l’IHM.
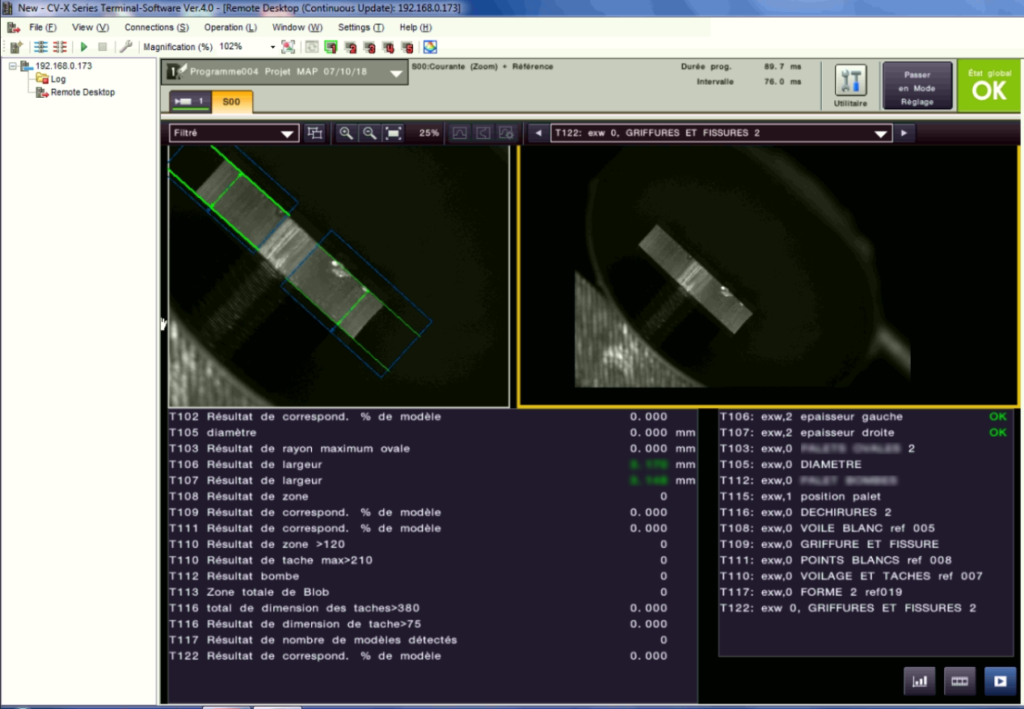
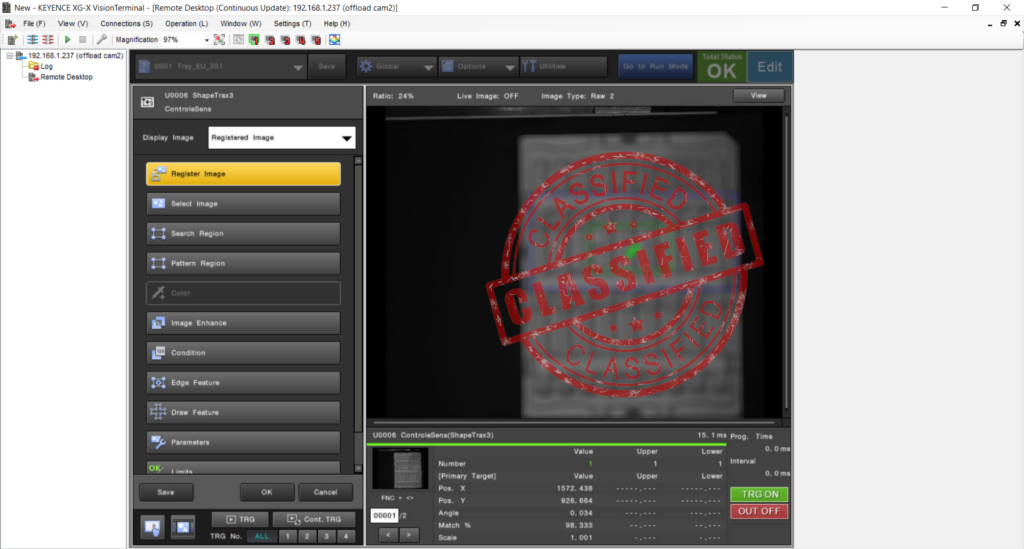
Inspection d’un produit sous une caméra de précision Keyence :
Caméra embarquée sur un robot Scara.
Détection de défaut de fabrication (tâches, déformation, poussière) par l’ajout d’un filtre polarisant.
Mesures de l’épaisseur pour envoi d’erreur pour mise au rebut si besoin.